Back to projects
Industry R&D | NTU
AESV Heavy-Duty Autonomous Sweeper
Full-stack autonomous driving deployed on a 4-ton sweeper at 13 km/h
Apr 2024 – Jul 2025
Overview
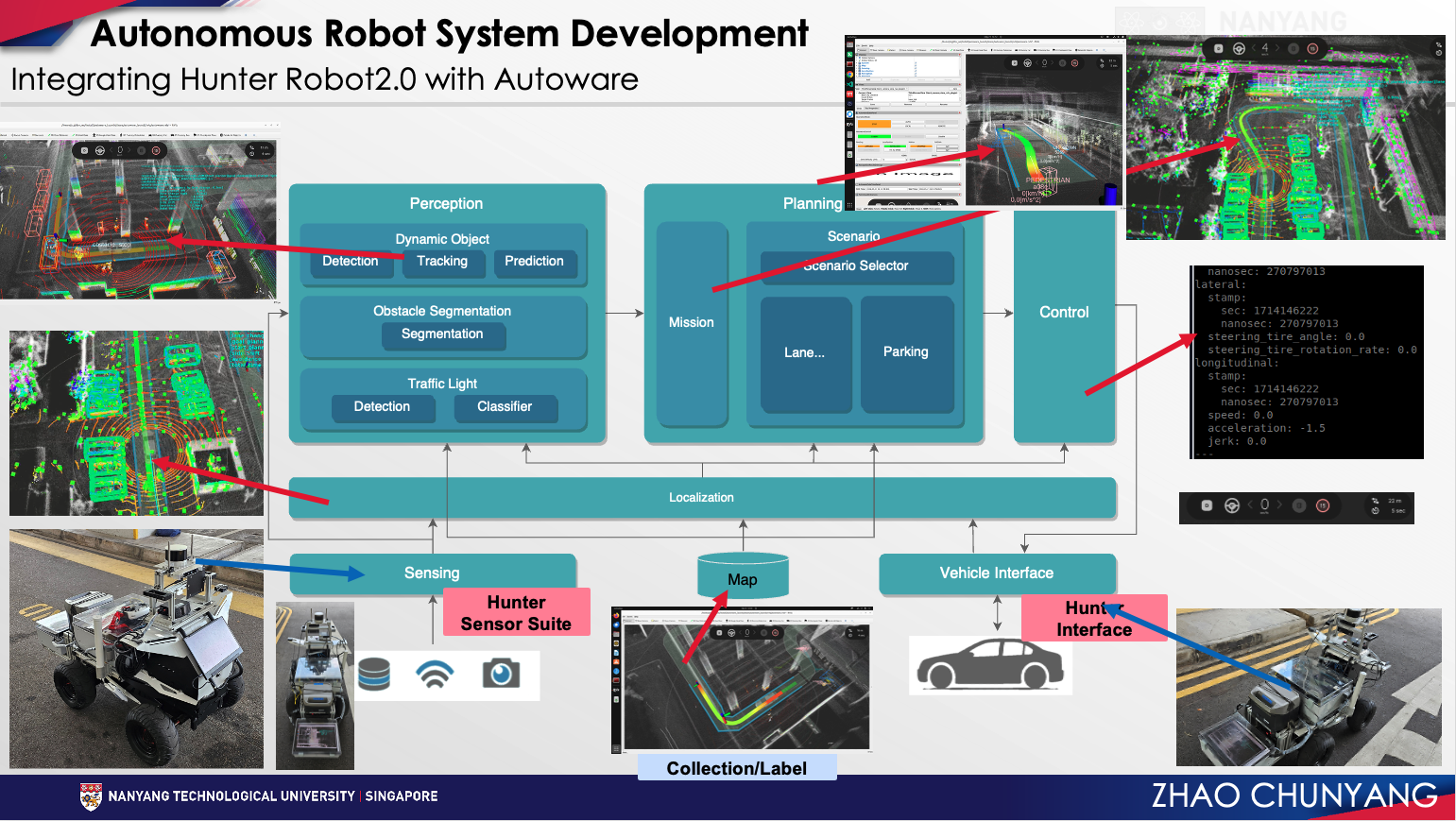
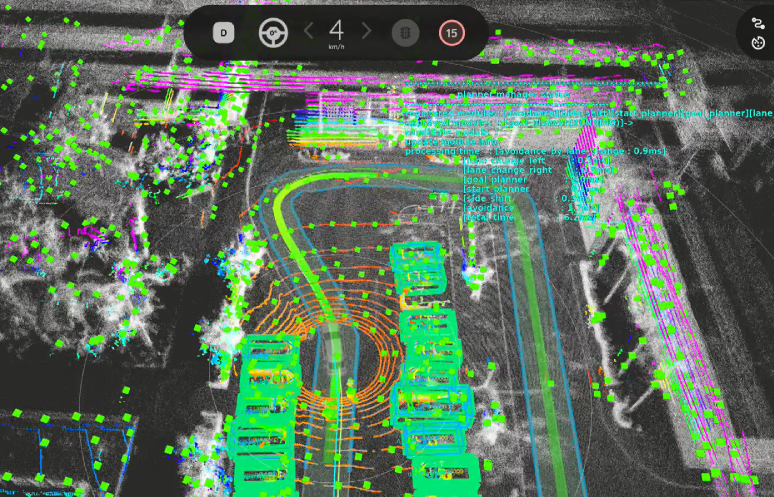
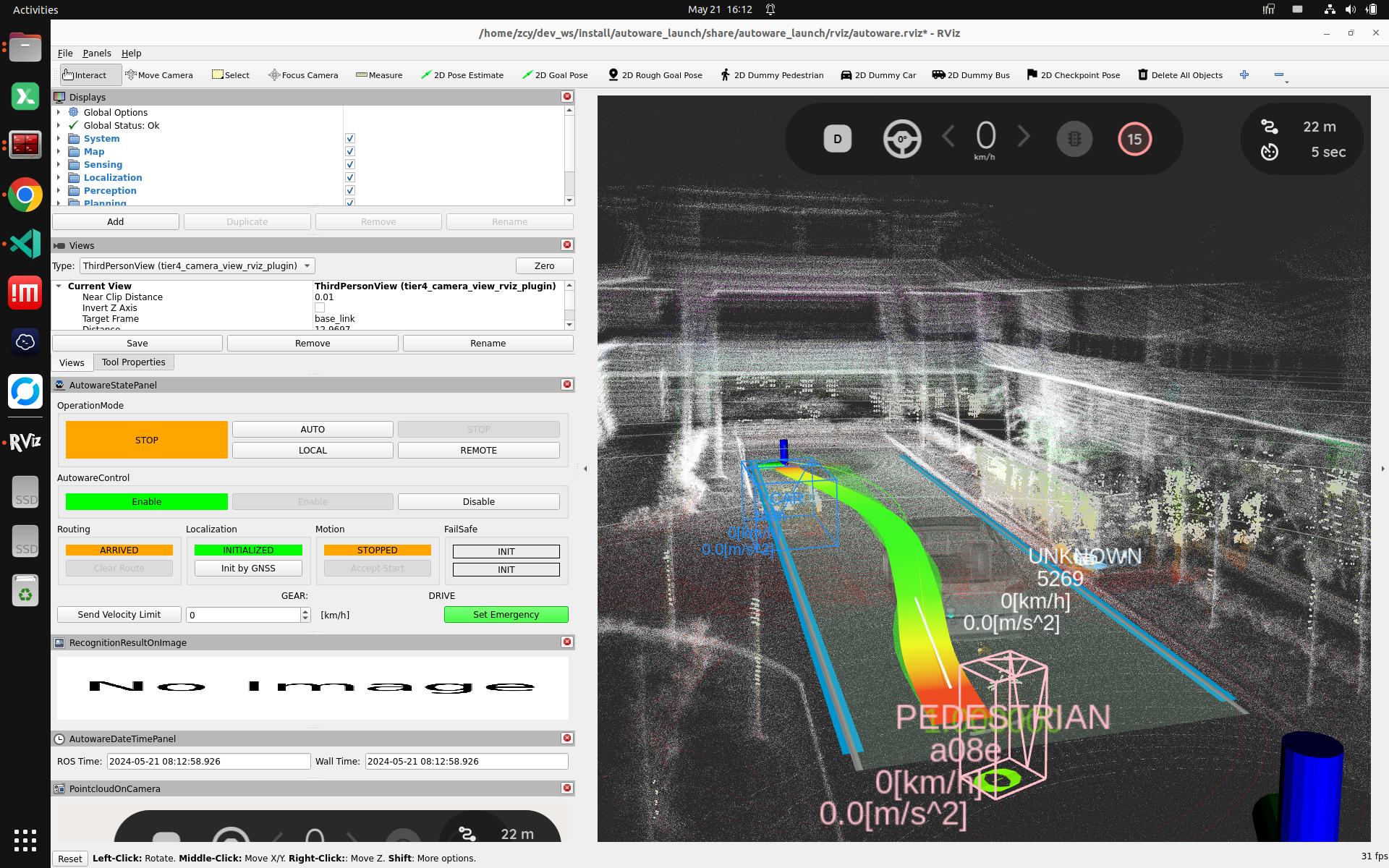
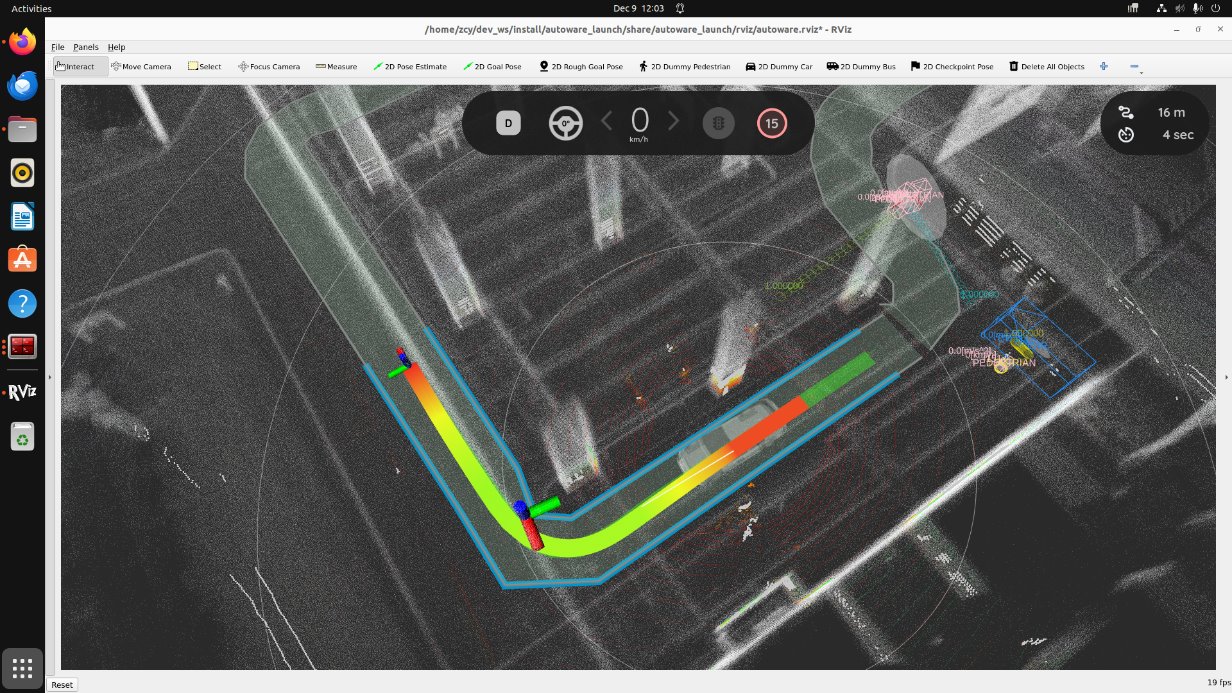
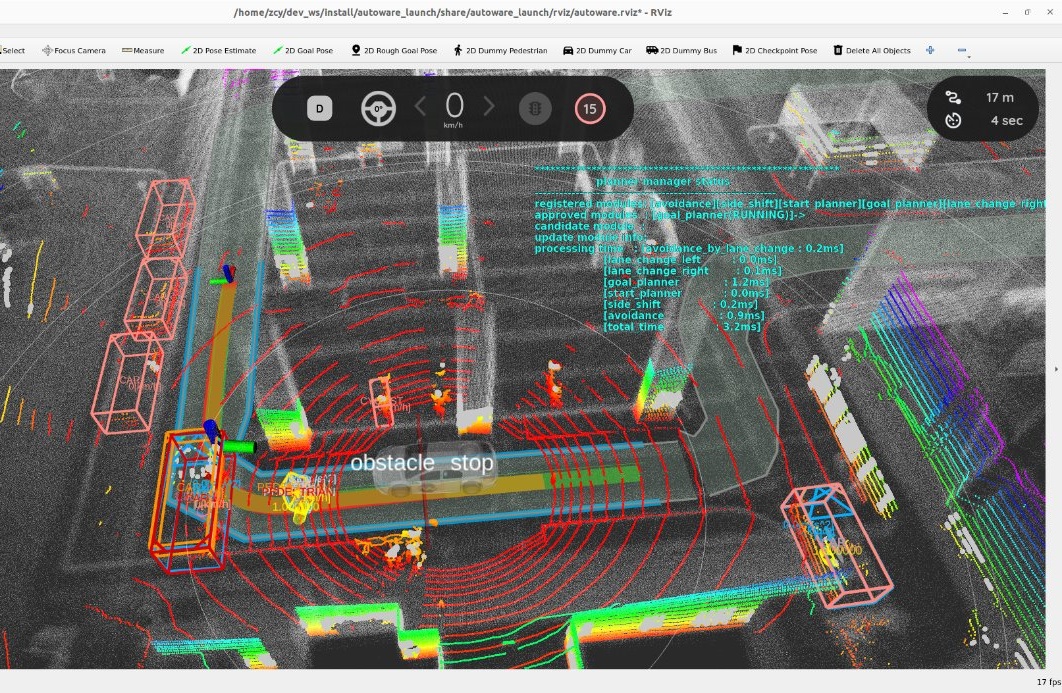
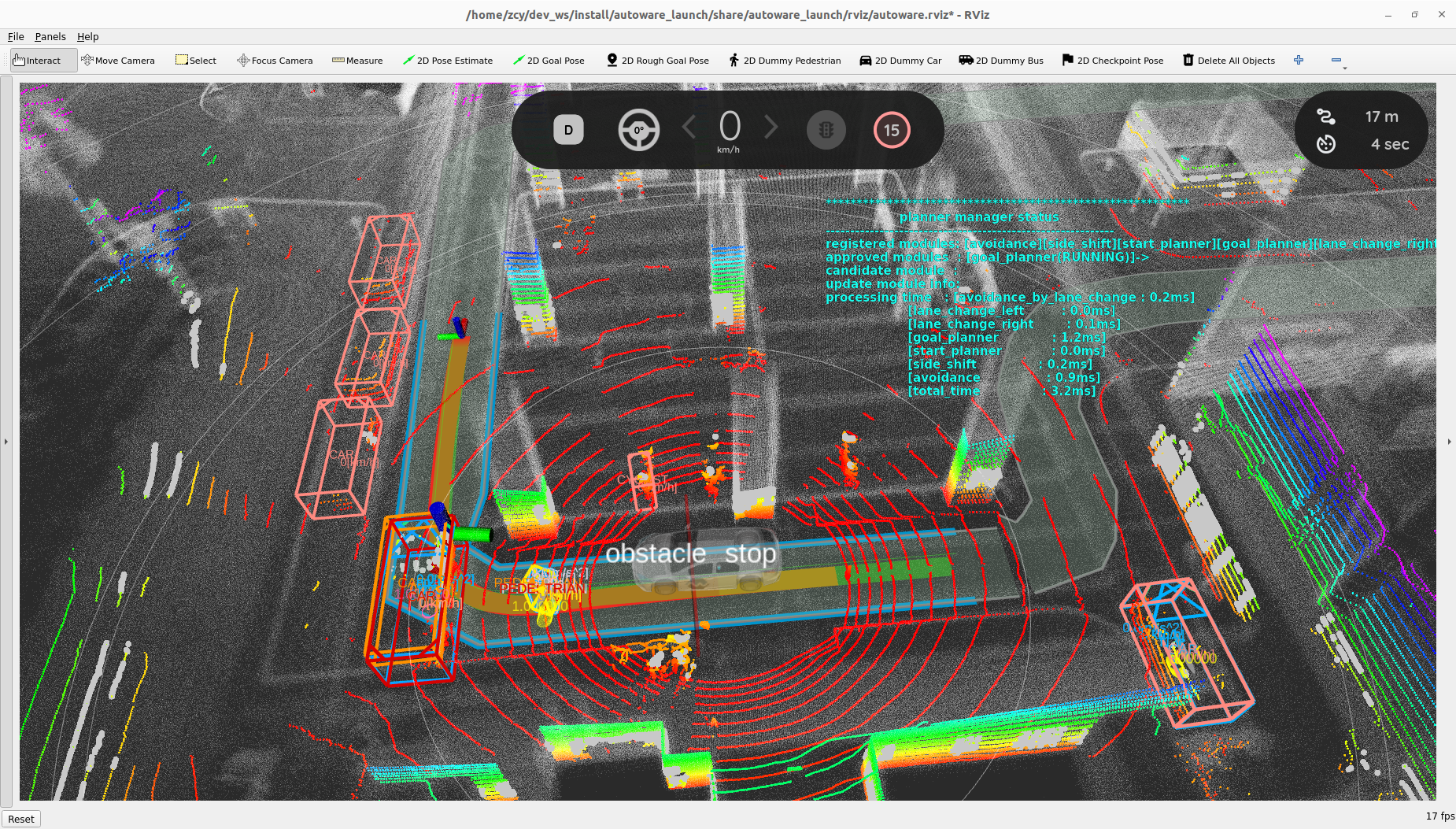
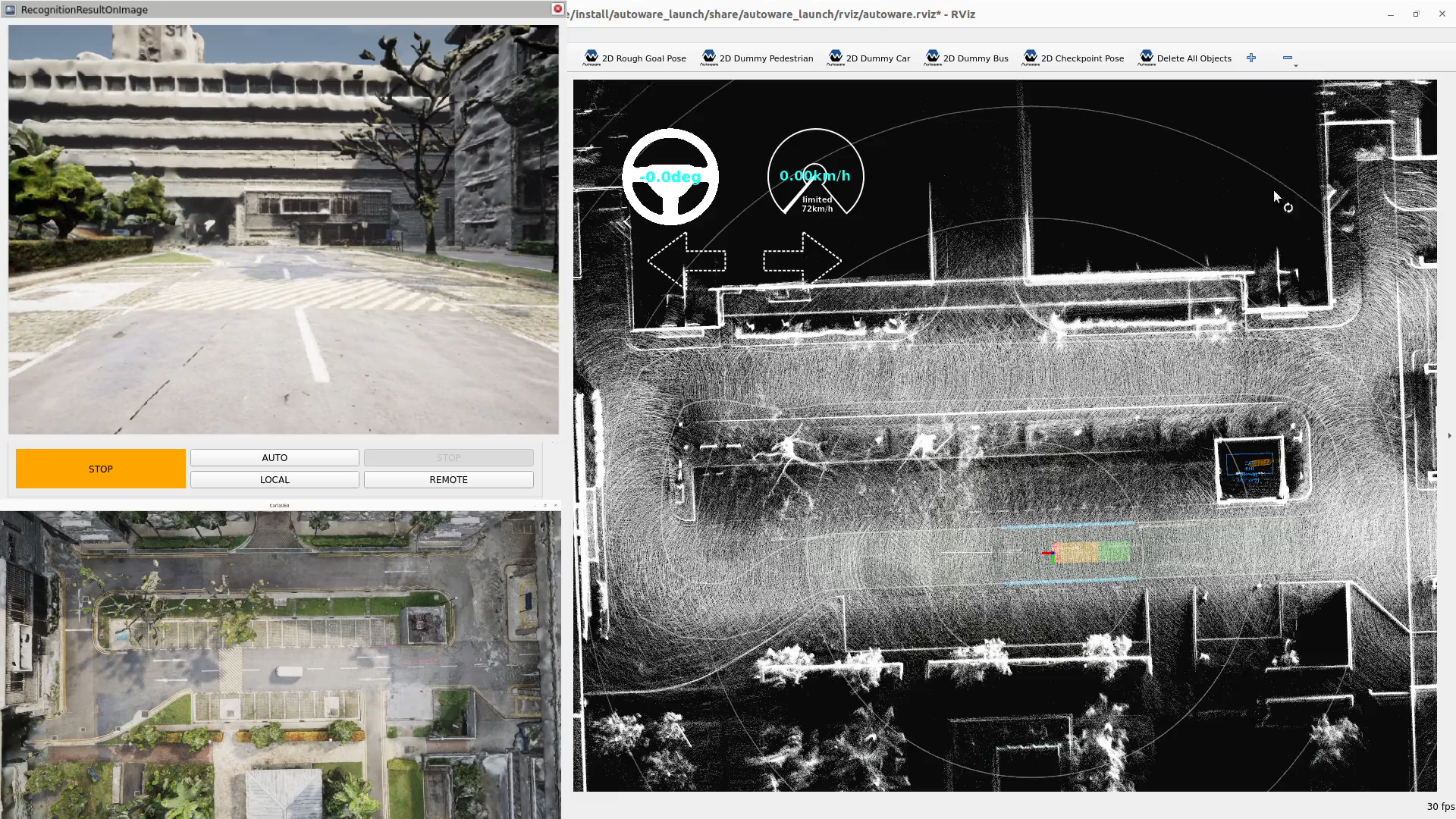
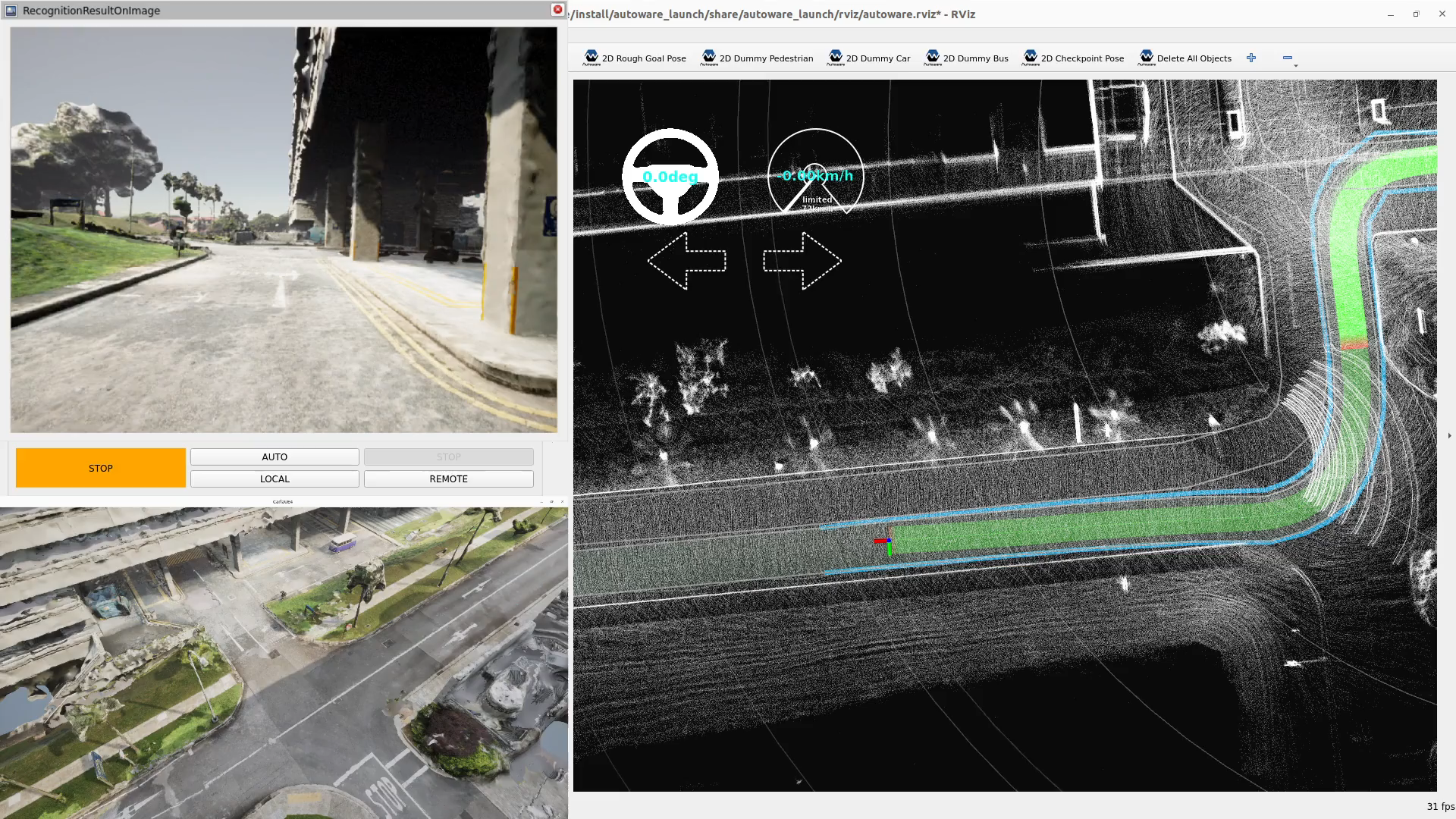
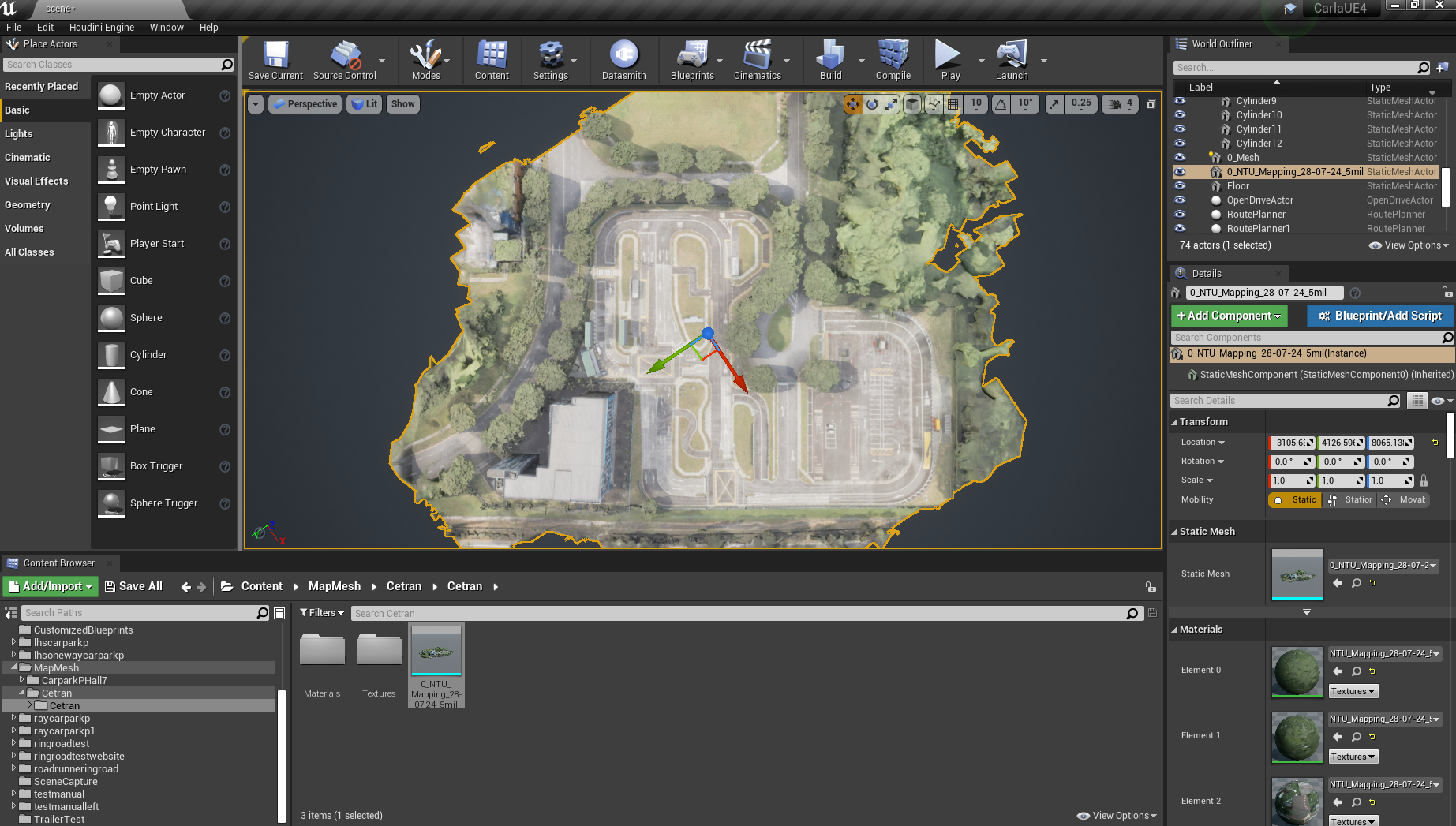
Led full-stack software development for autonomous driving on the AgileX Hunter 2.0 and a 4-ton articulated Bucher Municipal Sweeper. Customized and deployed the Autoware Universe autonomy stack on both platforms. Developed a digital-twin autonomous simulation system in CARLA (UE4) for validation before field testing. Delivered autonomous field demos at NTU and CETRAN, with the Sweeper reaching 13 km/h.
AESV Sweeper
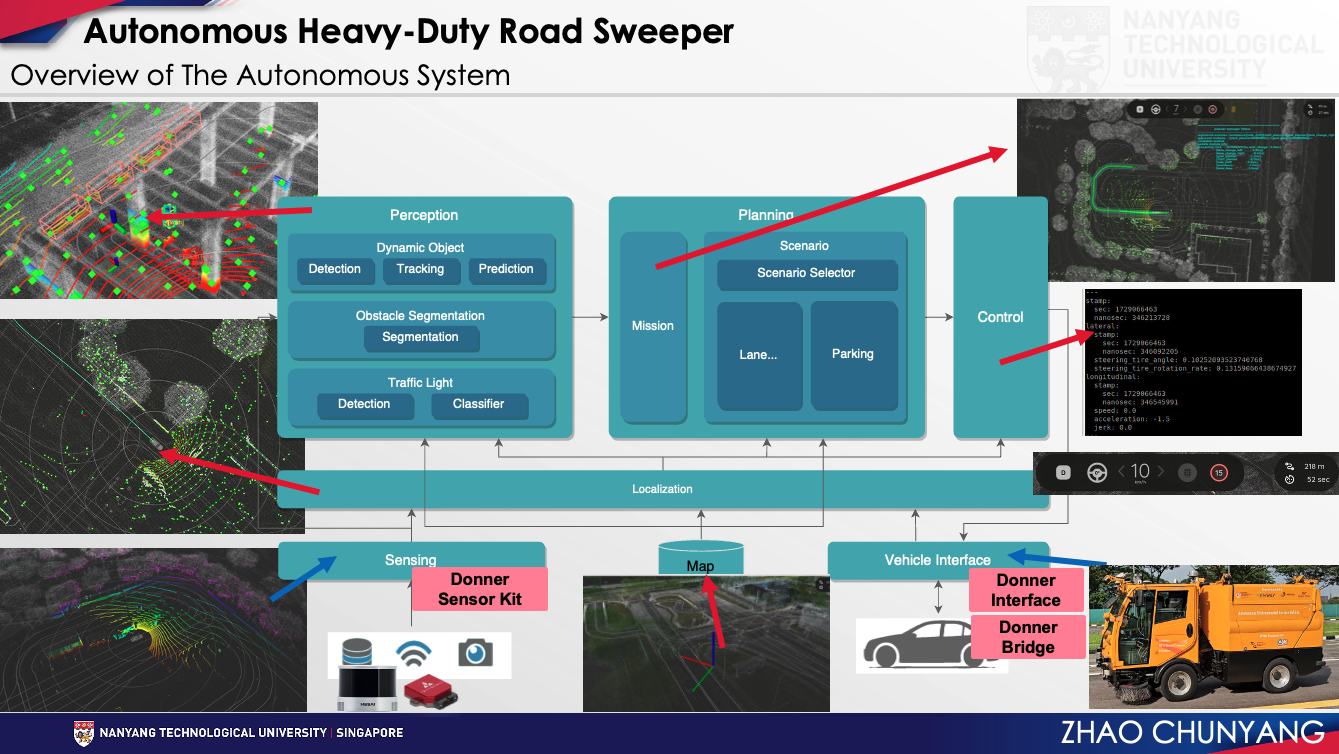
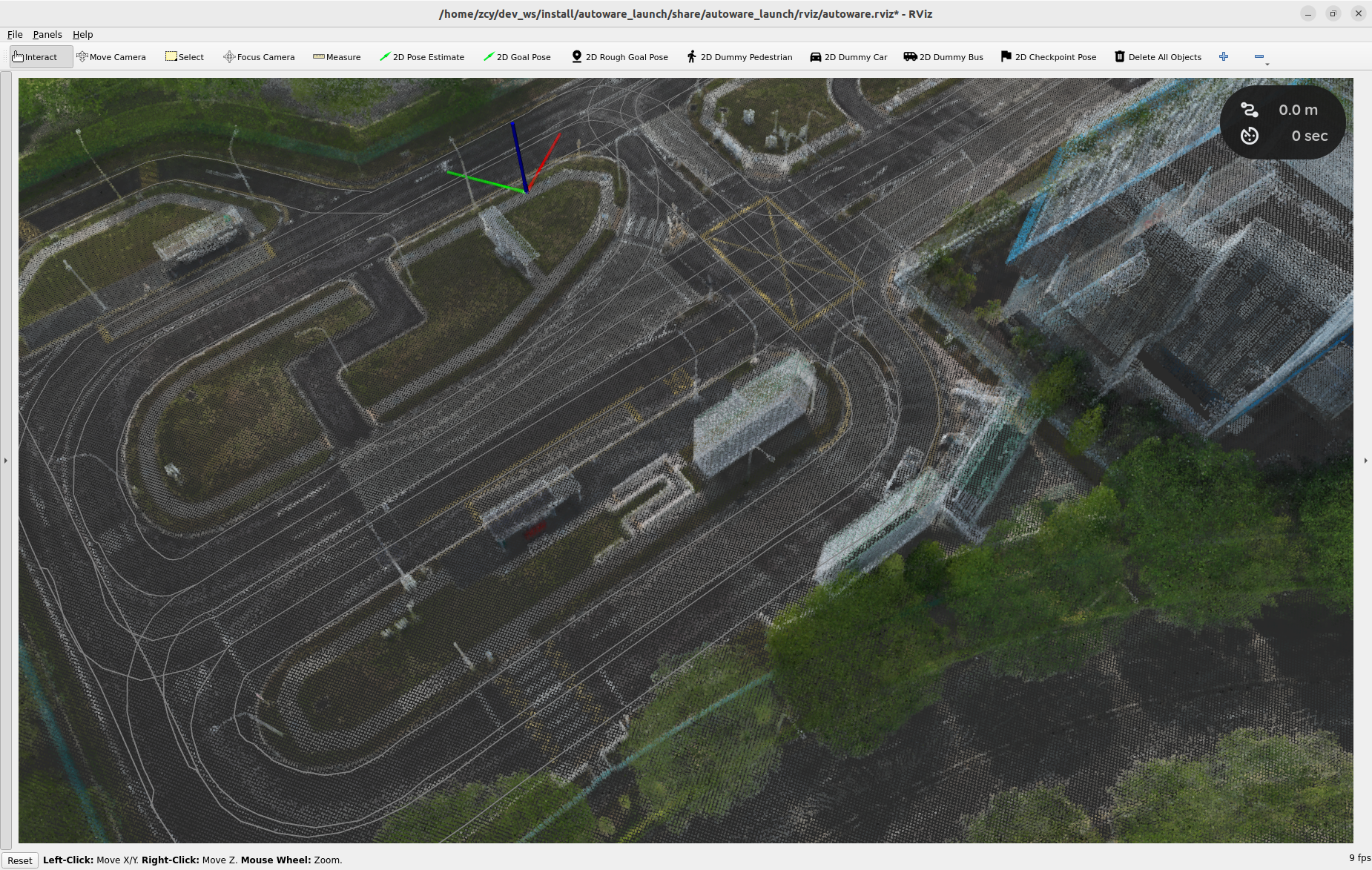
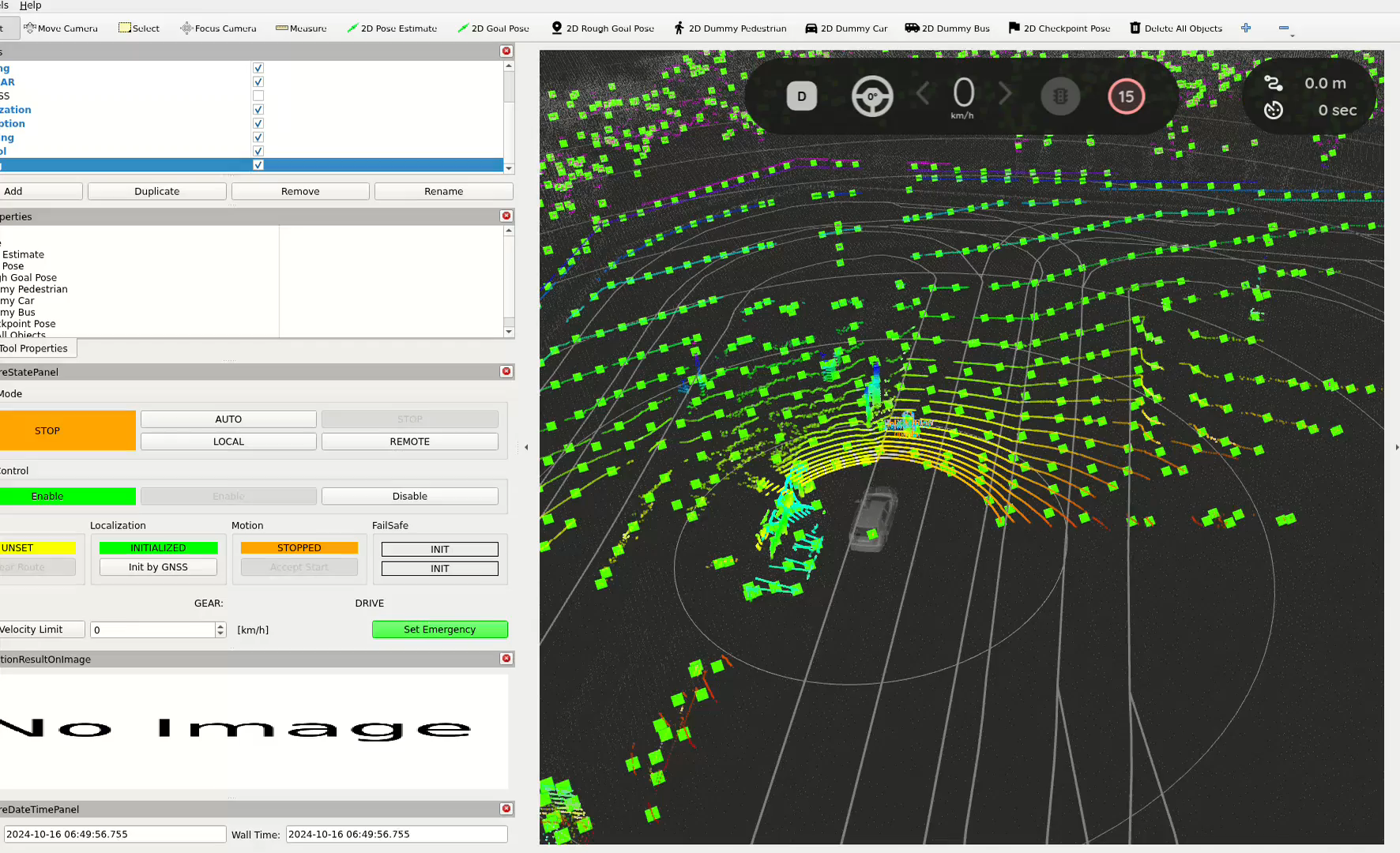
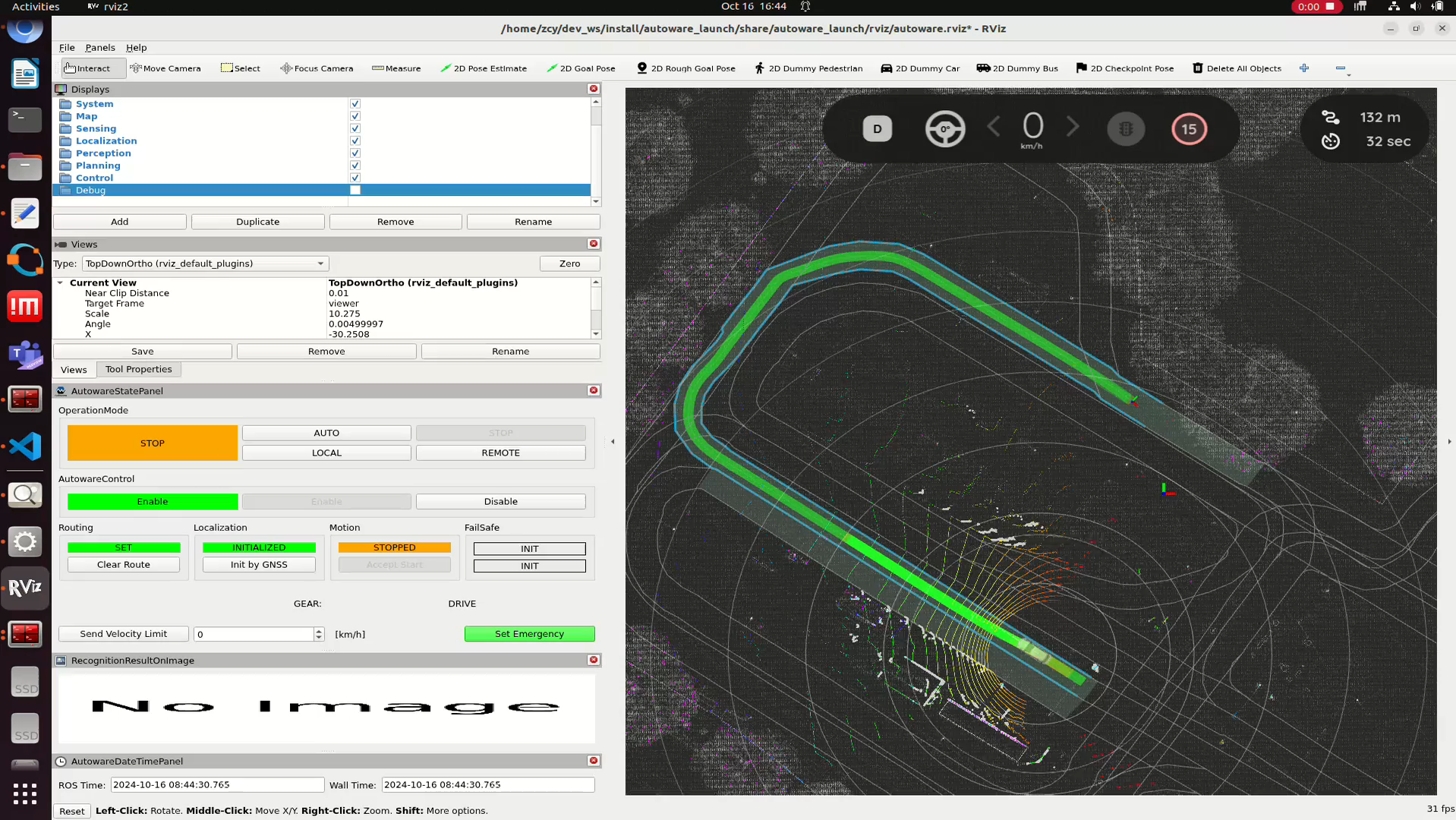
System Architecture
Field Demo
Memories





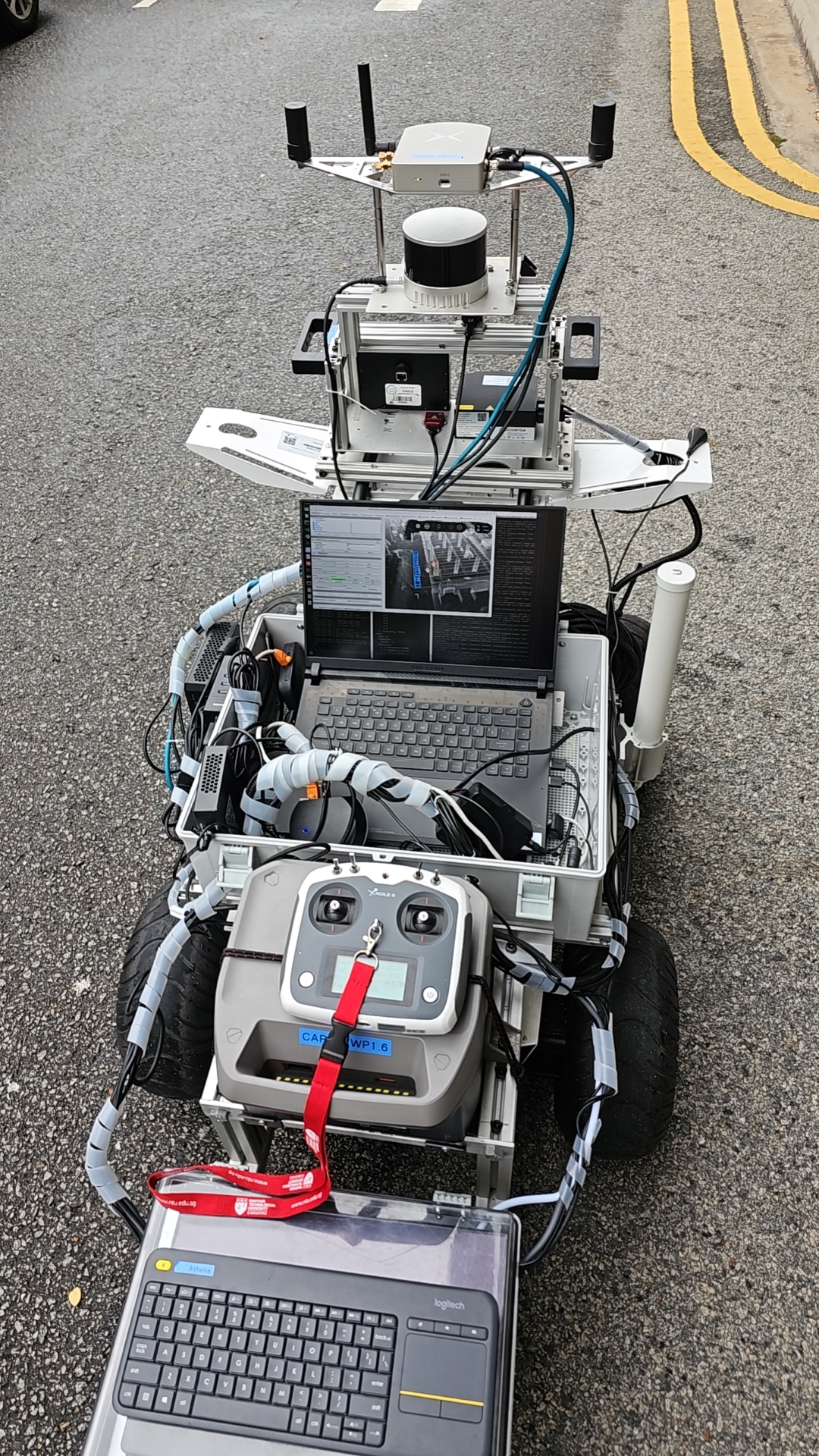
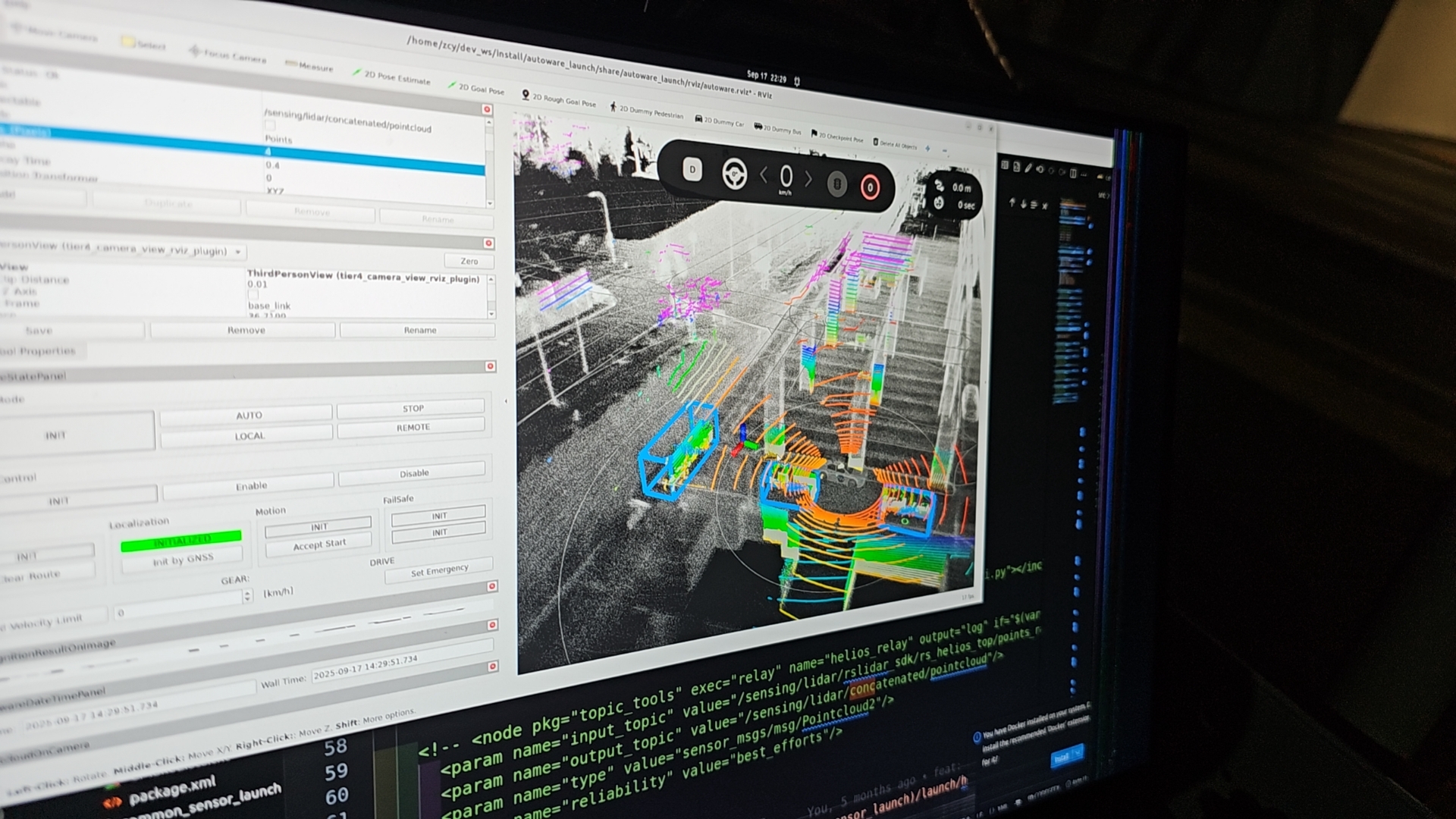
Hunter 2.0
System Architecture
Field Demo
Memories










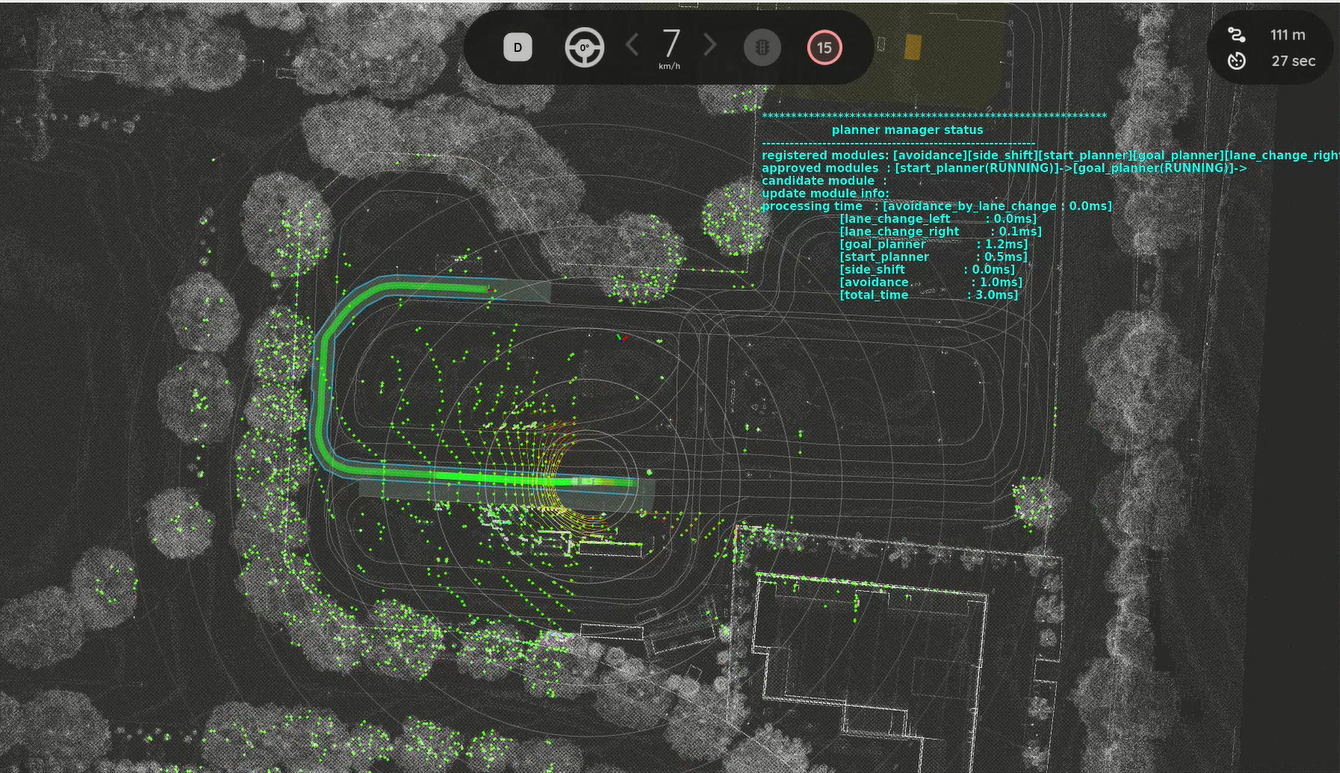
Digital-Twin Autonomous Simulator
NTU Carpark P
CETRAN Test Track






Autoware UniverseROS2LiDAR CenterPointTensorRTCARLA/UE4ros1_bridgeFkie Multi MasterZeroMQNDT+EKF