Industry R&D | NTU
AESV Heavy-Duty Autonomous Sweeper
Full-stack autonomous driving deployed on a 4-ton sweeper at 13 km/h
Autoware UniverseROS2LiDAR CenterPointTensorRTCARLA/UE4+4
View DetailsBuilder · Learner · Researcher · Engineer · Coder
Builder, researcher, and engineer bridging AI and robotics. Core expertise in autonomous driving, multi-modal sensor fusion, 3D reconstruction, and human-robot interaction. Hands-on with LLM-powered agentic systems, from deep learning training to edge deployment.
Research and engineering work spanning teleoperation, autonomous driving, 3D reconstruction, and generative AI.
Full-stack autonomous driving deployed on a 4-ton sweeper at 13 km/h

Multi-robot coordination, semantic mapping, and leader-follower formation — 3 journal + 5 conference papers
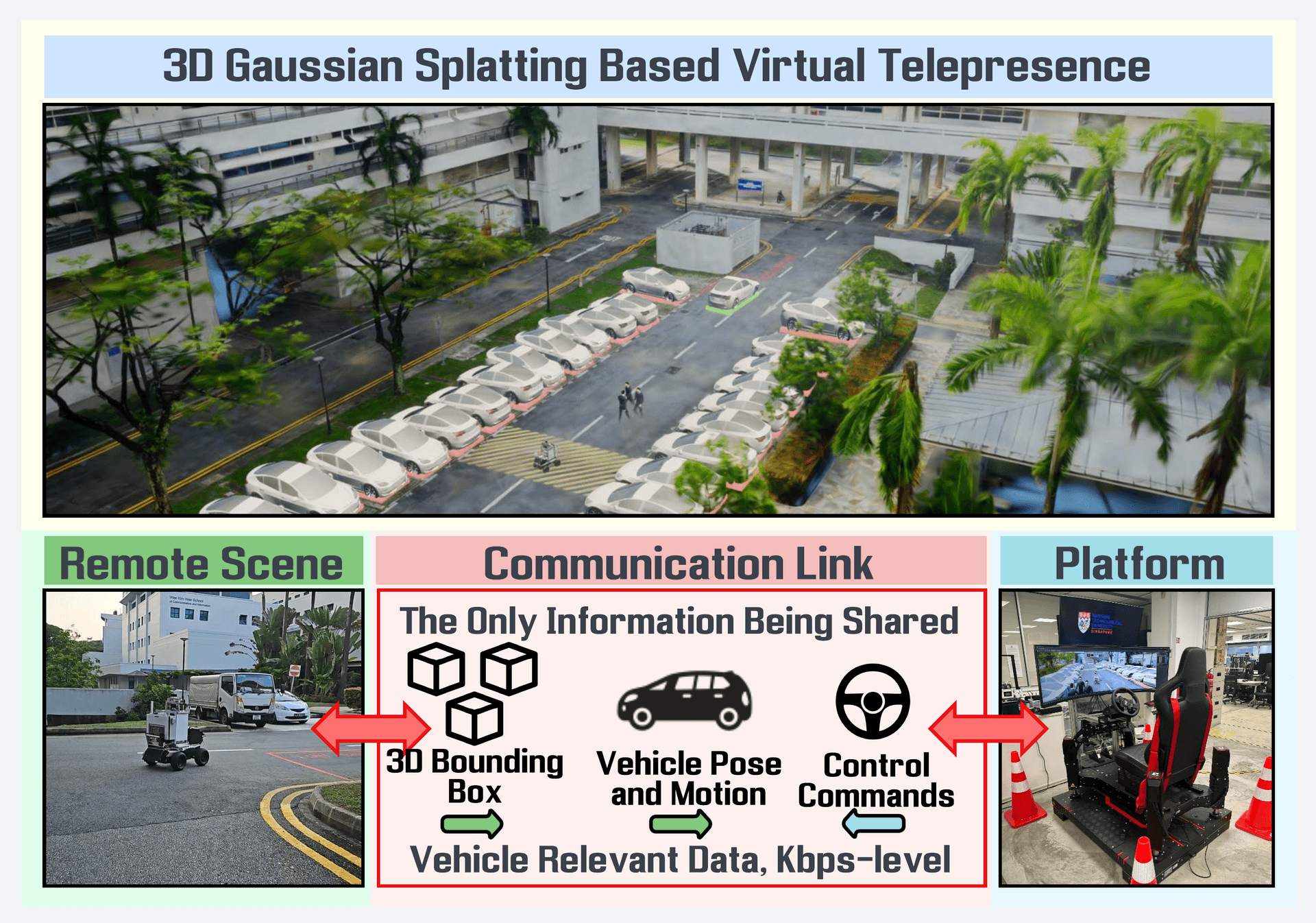
3DGS-based robot teleoperation with 360° free-viewpoint rendering at minimal bandwidth
Peer-reviewed publications at top robotics venues including IROS, ICRA, T-ITS, T-IE, and T-Mech.
Yuanzhe Wang, Chunyang Zhao, Jiahao Liang, Mingxing Wen, Yufeng Yue, Danwei Wang
COSEM: Collaborative Semantic Map Matching Framework for Autonomous Robots
Yufeng Yue, Mingxing Wen, Chunyang Zhao, Yuanzhe Wang, Danwei Wang
Collaborative Semantic Understanding and Mapping Framework for Autonomous Systems
Yufeng Yue, Chunyang Zhao, Zhenyu Wu, Chule Yang, Yuanzhe Wang, Danwei Wang
2025
Tele-GS: 3D Gaussian Scene Representation for Low-Bandwidth Teleoperation
Chunyang Zhao, Zeyu Zhou, Haoran Liu, Dogan Kircali, Huan Yang, Chang Boon Low, Yuanzhe Wang, Danwei Wang
2024
Towards Kbps-level Vehicle Teleoperation via Persistent-Transient Environment Modelling
Chunyang Zhao, Zeyu Zhou, Haoran Liu, Dogan Kircali, Guoyi Chi, Hongming Shen, Yuanzhe Wang, Danwei Wang
Real-Time GNSS Spoofing Detection for Autonomous Vehicles: An Attention-Based Autoencoder Approach
Huan Yang, Guoqiang Liu, Chunyang Zhao, Mingxing Wen, Yuanzhe Wang
Yichen Zhou, Mingxing Wen, Xun Chen, Chunyang Zhao, Jiajie Guo, Jun Zhang, Yufeng Yue, Yingchong Ma
MM4MM: Map Matching Framework for Multi-Session Mapping in Ambiguous Environments
Zhenyu Wu, Wei Wang, Chunyang Zhao, Yufeng Yue, Jun Zhang, Hongming Shen, Danwei Wang
2023
Secure Localization of Autonomous Articulated Vehicles: Attack Detection and Recovery
Yuanzhe Wang, Chunyang Zhao, Haoyi Wang, Jun Zhang, Danwei Wang
NTU4DRadLM: 4D Radar-Centric Multi-Modal Dataset for Localization and Mapping
Jun Zhang, Huayang Zhuge, Yiyao Liu, Guohao Peng, Zhenyu Wu, Haoyuan Zhang, Qiyang Lyu, Heshan Li, Chunyang Zhao, Dogan Kircali, Sanat Mharolkar, Xun Yang, Su Yi, Yuanzhe Wang, Danwei Wang
2022
A Robust Sidewalk Navigation Method for Mobile Robots Based on Sparse Semantic Point Cloud
Mingxing Wen, Yunxiang Dai, Tairan Chen, Chunyang Zhao, Jun Zhang, Danwei Wang
Aerial-Ground Robots Collaborative 3D Mapping in GNSS-Denied Environments
Yufeng Yue, Chunyang Zhao, Yuanzhe Wang, Yi Yang, Danwei Wang
SectionKey: 3-D Semantic Point Cloud Descriptor for Place Recognition
Shutong Jin, Zhenyu Wu, Chunyang Zhao, Jun Zhang, Guohao Peng, Danwei Wang
2020
Collaborative Semantic Perception and Relative Localization Based on Map Matching
Yufeng Yue, Chunyang Zhao, Mingxing Wen, Zhenyu Wu, Danwei Wang
A Hierarchical Framework for Collaborative Probabilistic Semantic Mapping
Yufeng Yue, Chunyang Zhao, Ruilin Li, Chule Yang, Jun Zhang, Mingxing Wen, Yuanzhe Wang, Danwei Wang
2019
Probabilistic 3D Semantic Map Fusion Based on Bayesian Rule
Yufeng Yue, Ruilin Li, Chunyang Zhao, Chule Yang, Jun Zhang, Mingxing Wen, Guohao Peng, Zhenyu Wu, Danwei Wang
UAV-based Traffic Flow Estimation and Analysis
Ji Hong, Zhi Gao, Tiancan Mei, Yifan Li, Chunyang Zhao
I am a PhD candidate at Nanyang Technological University (NTU), Singapore, specializing in robotics software engineering. My research bridges the gap between autonomous systems and human-robot interaction through novel 3D scene representations and real-time perception systems.
My work spans the full autonomy stack — from low-level sensor fusion and perception to high-level planning and teleoperation interfaces. I have deployed autonomous systems on platforms ranging from research robots to 4-ton industrial sweepers operating in real-world environments.
Beyond robotics, I am passionate about building polished software and exploring the intersection of 3D graphics, AI, and real-time systems.
ROS2 · Autoware · CARLA · Drive-by-Wire
LiDAR CenterPoint · TensorRT · 3D Object Detection · Tracking
3D Gaussian Splatting · Point Clouds · Mesh Processing · LiDAR-Inertial Odometry
Unreal Engine 4/5 · CARLA · Digital Twin · Sensor Simulation
Zenoh · ZeroMQ · ROS1 Bridge · Fkie Multi Master
C++ · Python · TypeScript
Tracking visitors...
No visitor data yet