Sensing Infrastructure | NTU
Digital Twin Scanner
Hardware-synchronized multi-sensor platform for large-scale 3D reconstruction
Overview
Designed and built a hardware-synchronized multi-sensor scanning platform (LiDAR + IMU + 360° camera) with PPS time synchronization. The system produces high-fidelity 3D reconstructions — colored point clouds, textured meshes, and 3D Gaussian Splat scenes — for large-scale digital twin applications.
Key Achievement:Large-scale multi-sensor scanning platform producing photorealistic 3D reconstructions across three output modalities.
Scanner
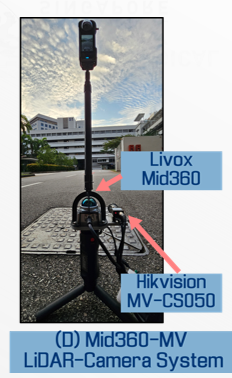
Gen 1 — Handheld LiDAR-Camera Scanner (Livox Mid-360 + Industrial Camera)

Gen 2 — Backpack Multi-Sensor Platform (LiDAR + IMU + 360° Camera + Compute Unit)
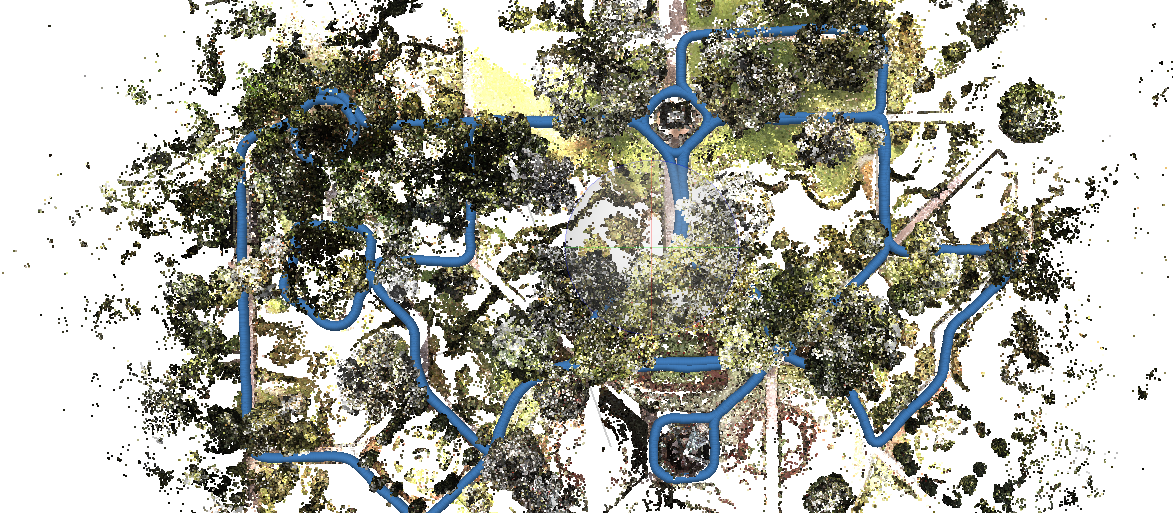
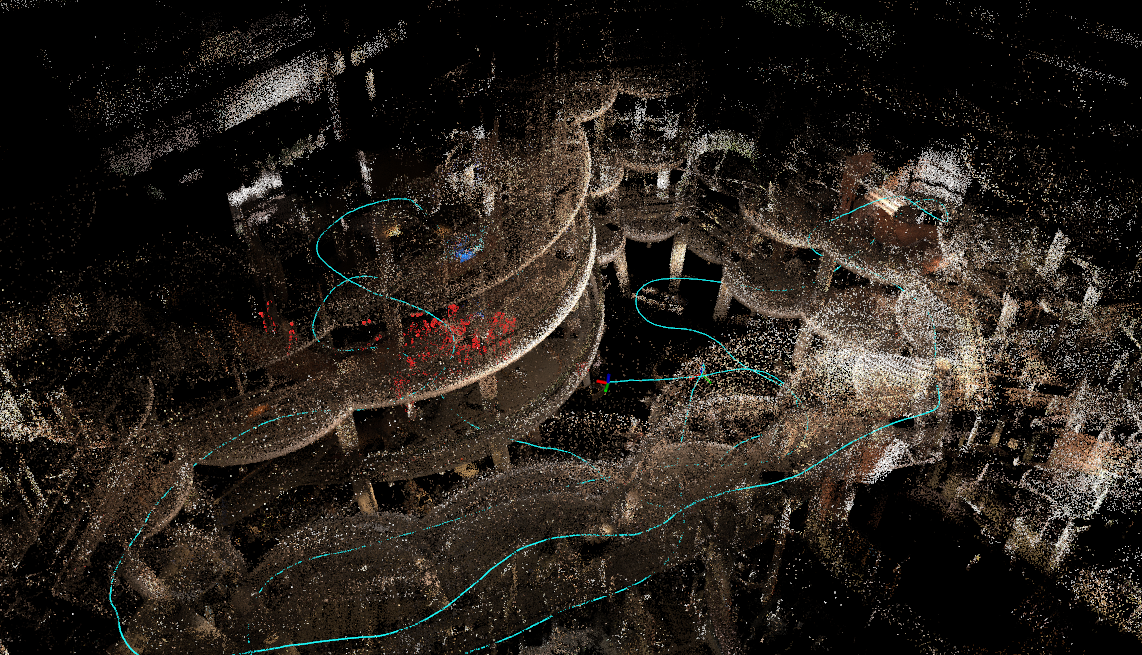
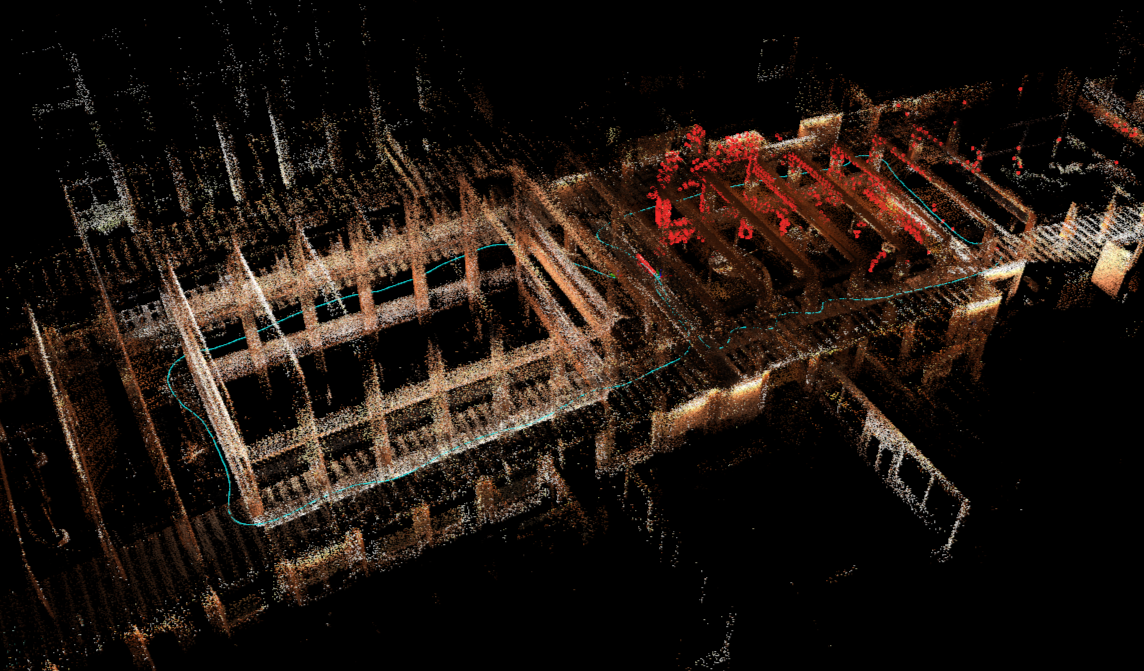
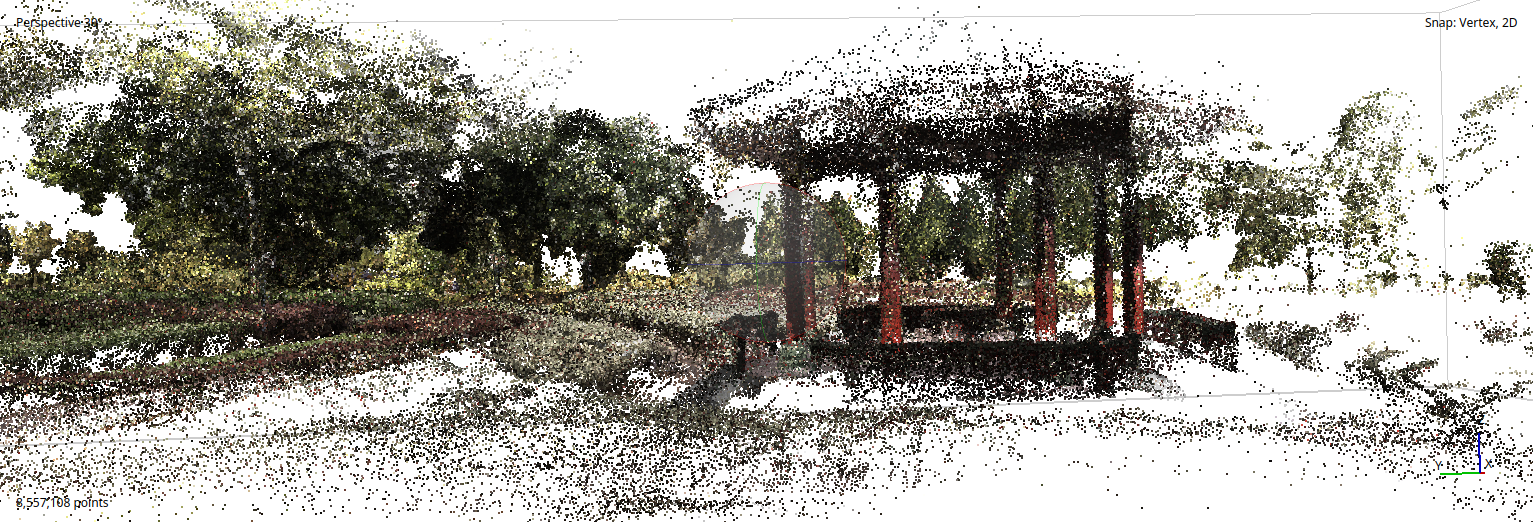
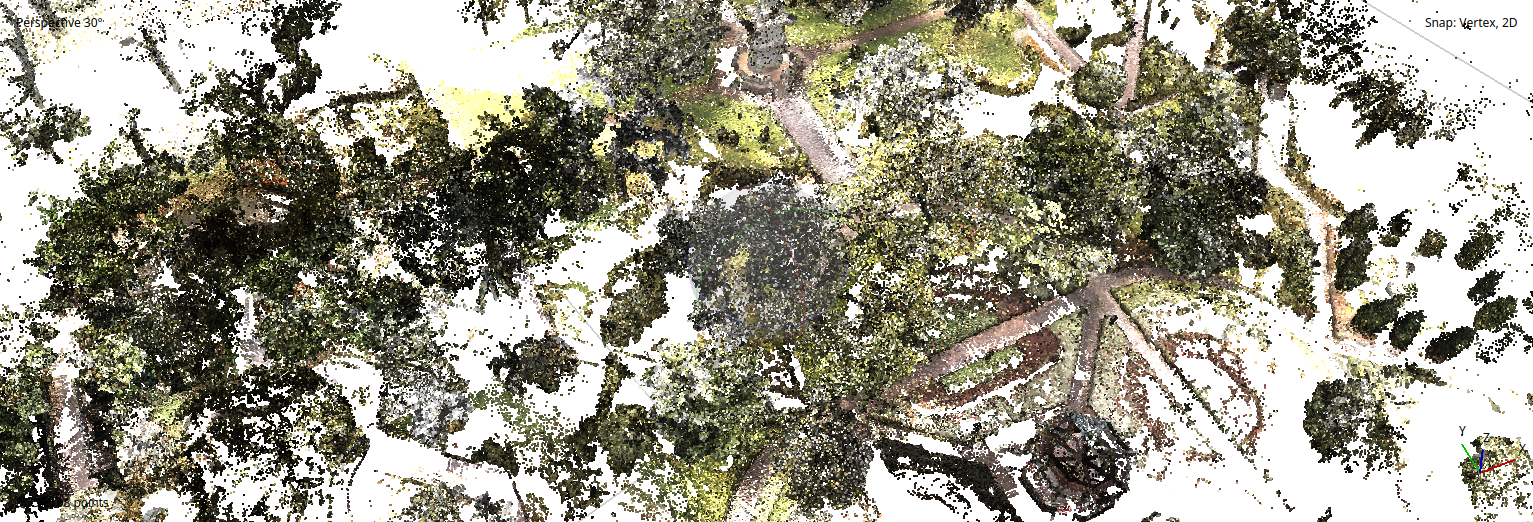
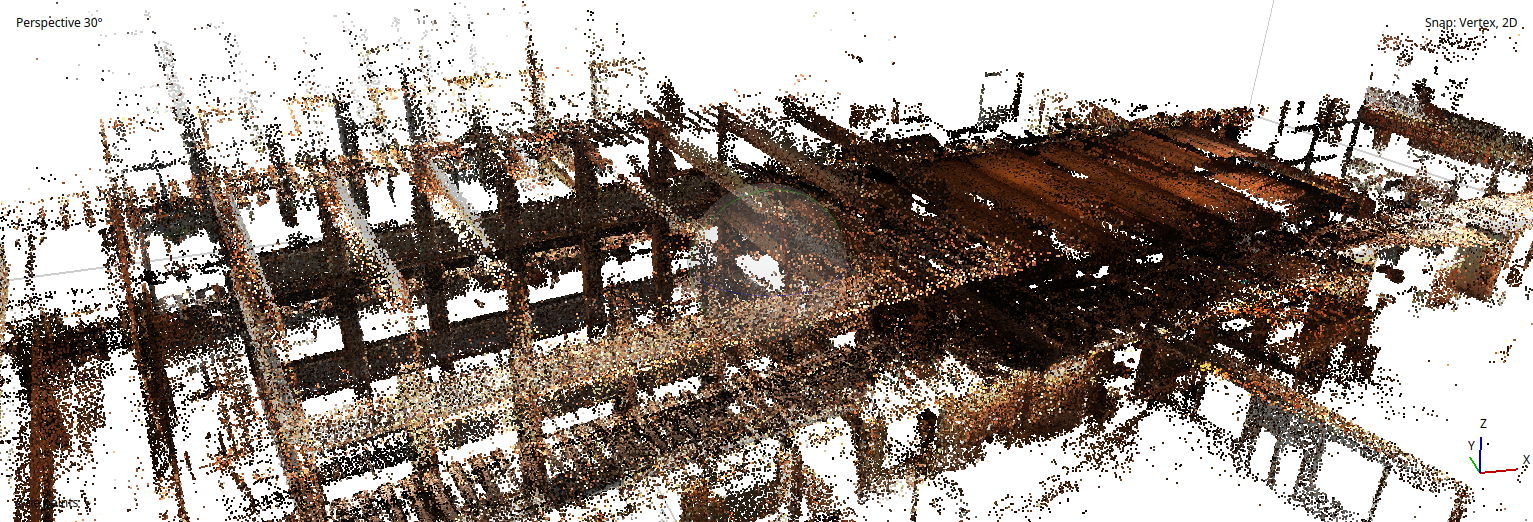
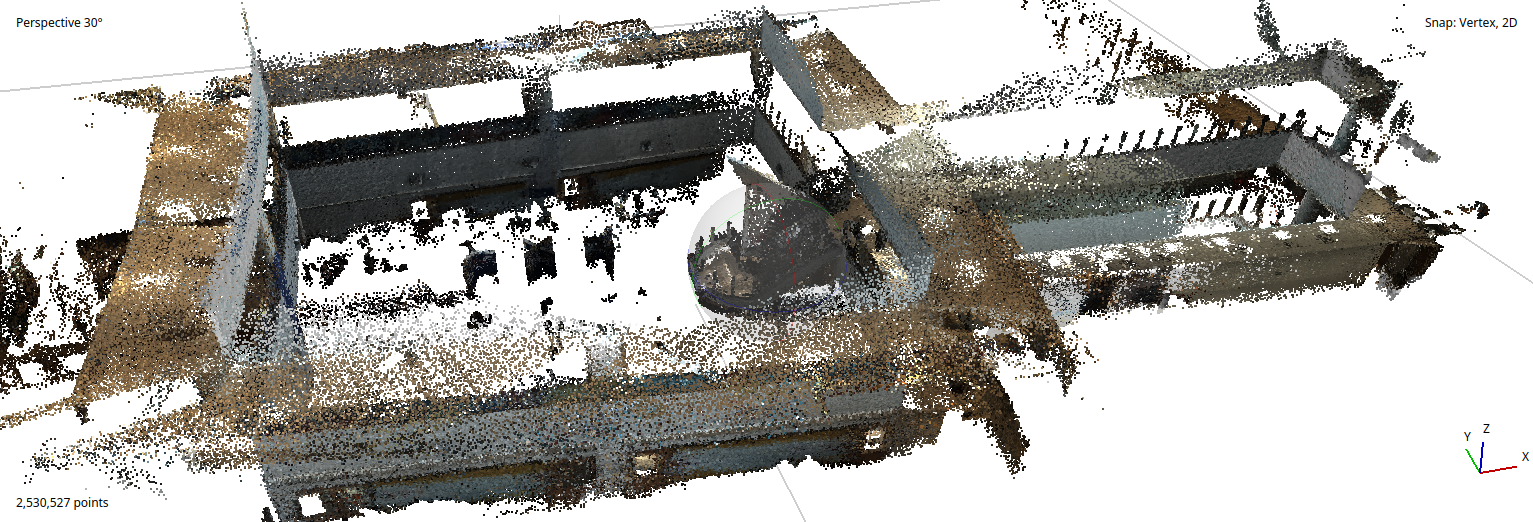
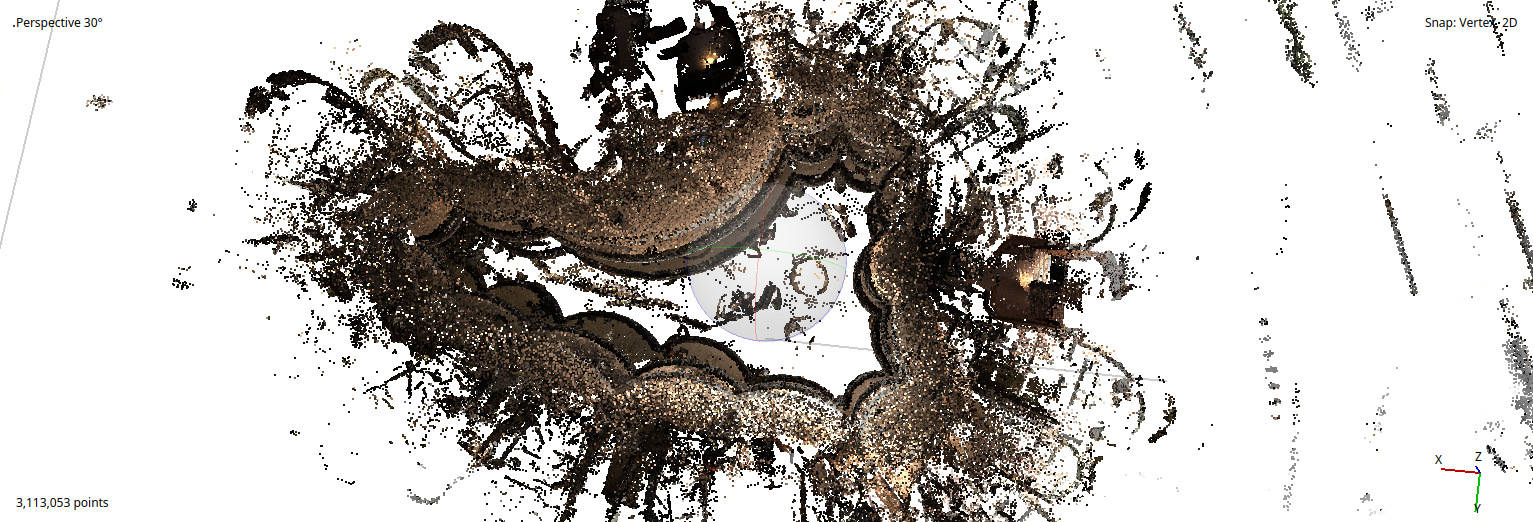
3D Point Cloud Reconstruction
Dense colored point clouds generated from LiDAR-inertial odometry fused with 360° imagery. Each scan captures millions of points with centimeter-level accuracy across campus-scale environments.

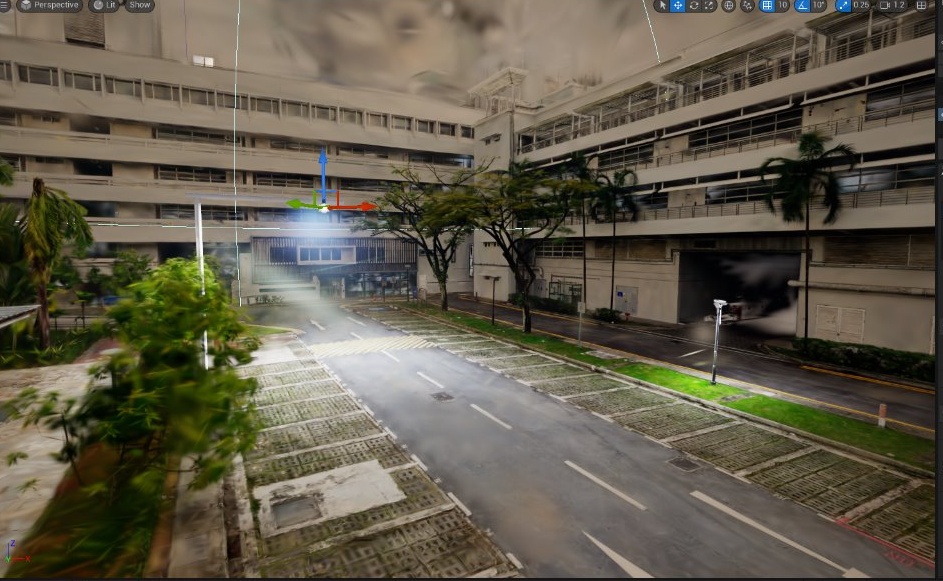
Textured Mesh Reconstruction
Watertight mesh models reconstructed from point clouds with texture mapping from camera imagery. Suitable for Unreal Engine integration and real-time simulation environments.





3D Gaussian Splatting
Novel view synthesis using 3D Gaussian Splatting trained on the captured multi-view imagery. Enables photorealistic real-time rendering of reconstructed scenes.