Back to projects
Research | NTU
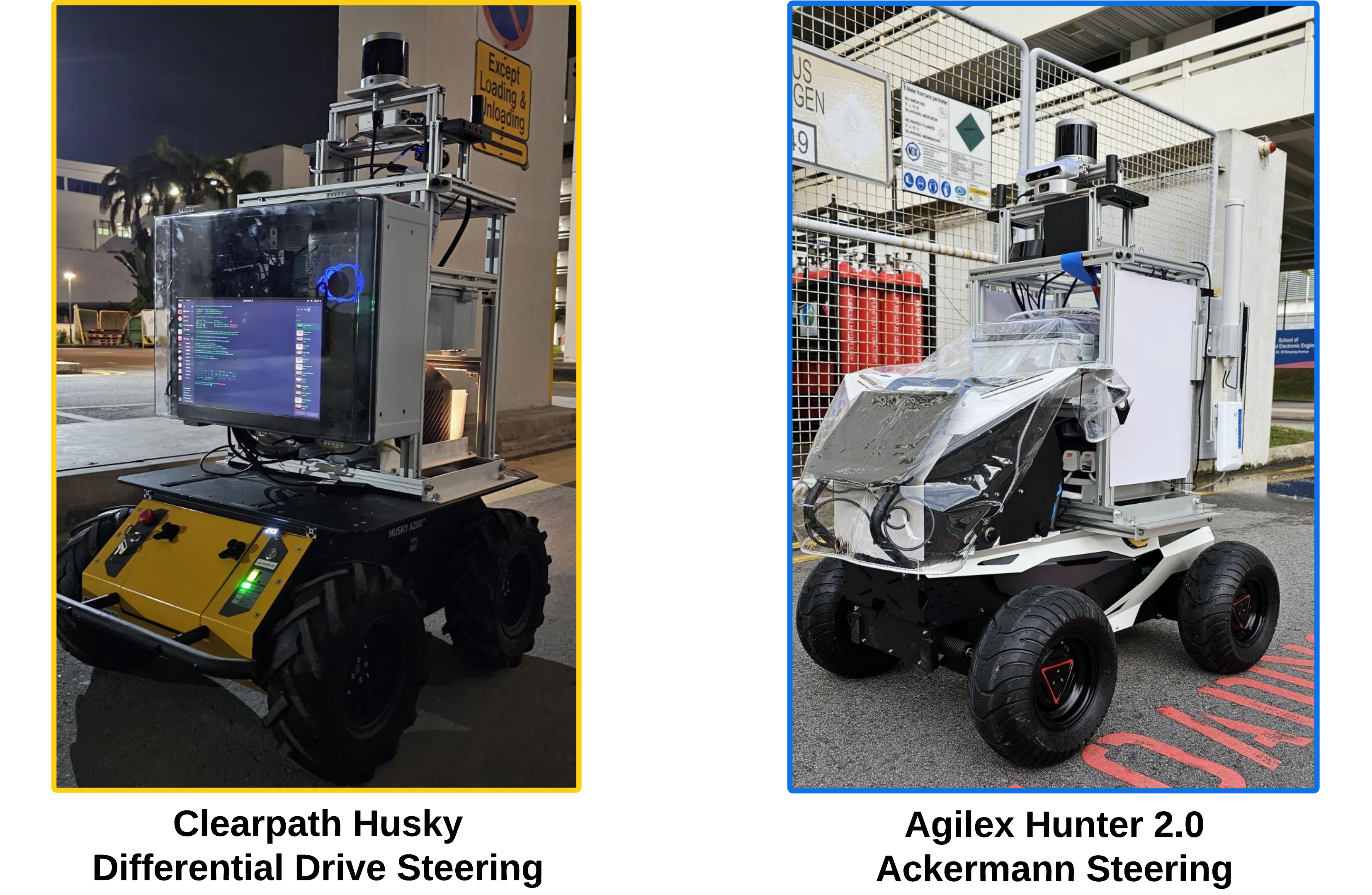
Beyond Video Streaming: Digital Twin Teleoperation at Kbps
3DGS-based robot teleoperation with 360° free-viewpoint rendering at minimal bandwidth
Sep 2023 – Present
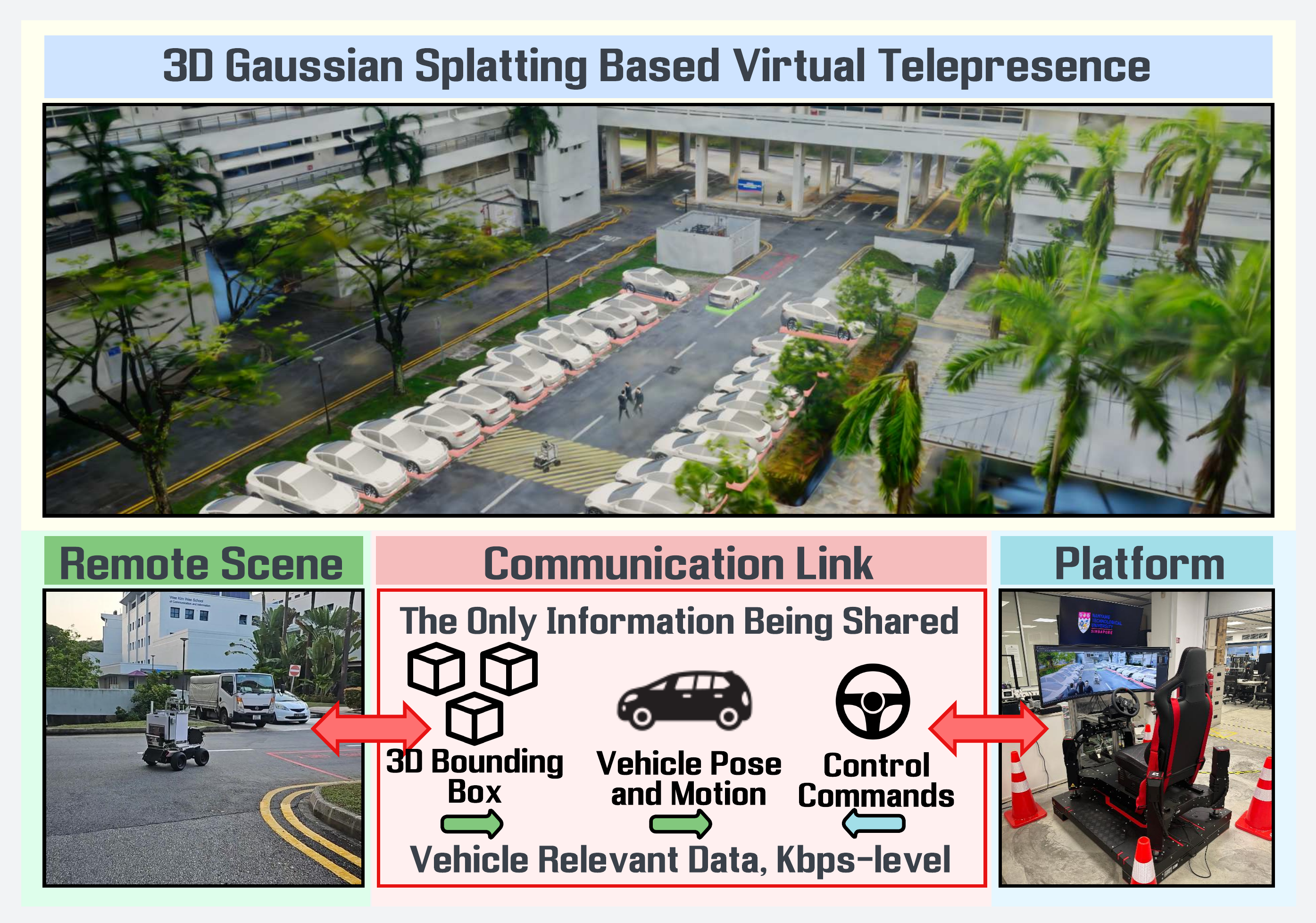
Overview
A digital twin teleoperation paradigm: pre-build the remote scene as a high-fidelity 3D twin, transmit only robot pose and dynamic obstacles at ~500 Kbps, enabling photorealistic 360° free viewpoints and day/night operation.
Tele-Twin (Gen 1)
Mesh-based digital twin teleoperation with photogrammetry reconstruction and 3-DOF motion feedback.
Communication Architecture
3-DOF Motion Platform

Tele-GS (Gen 2)
3D Gaussian Splatting replaces mesh — photorealistic rendering with 59% less GPU memory and 84% less storage.
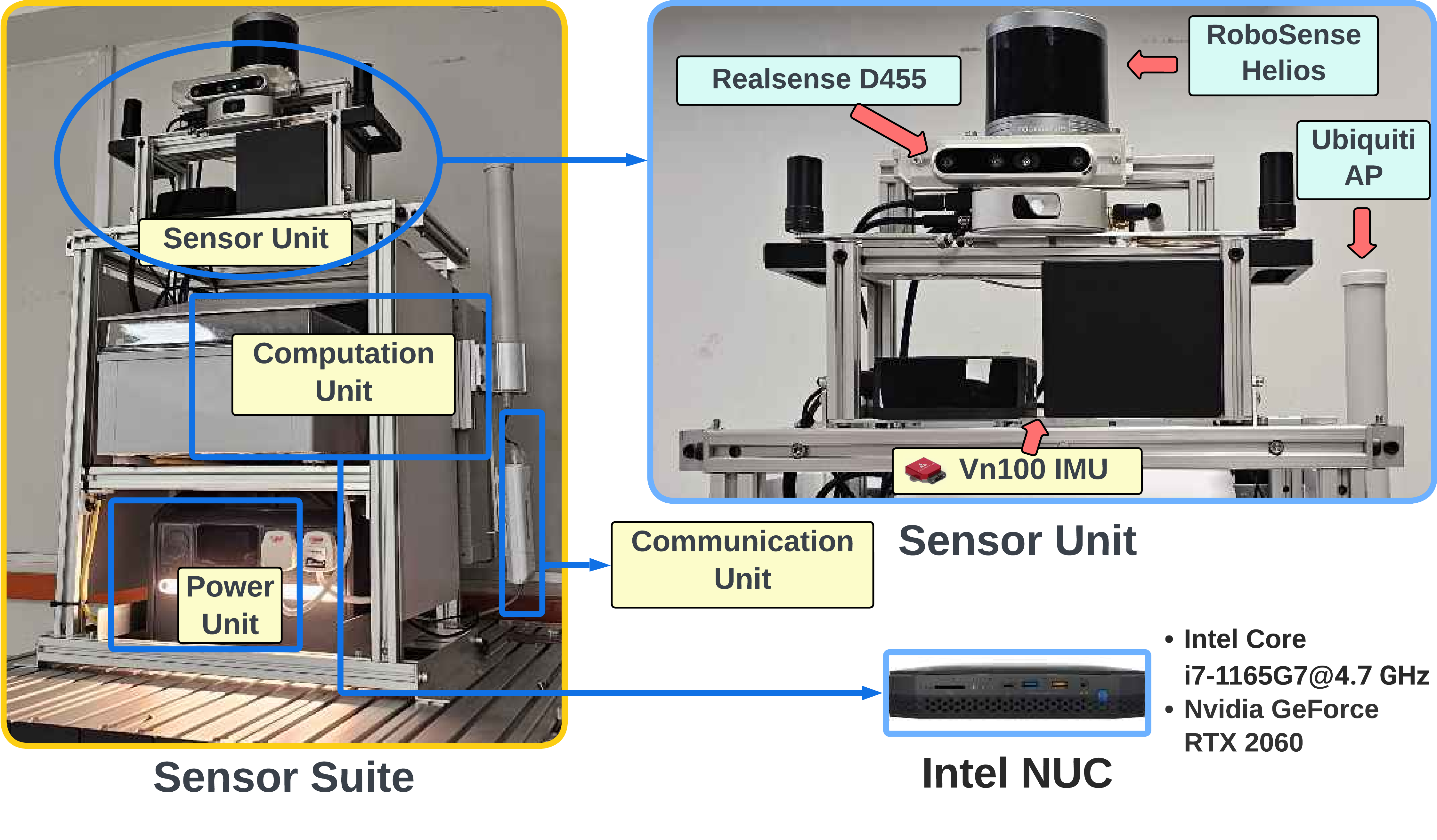
System Overview
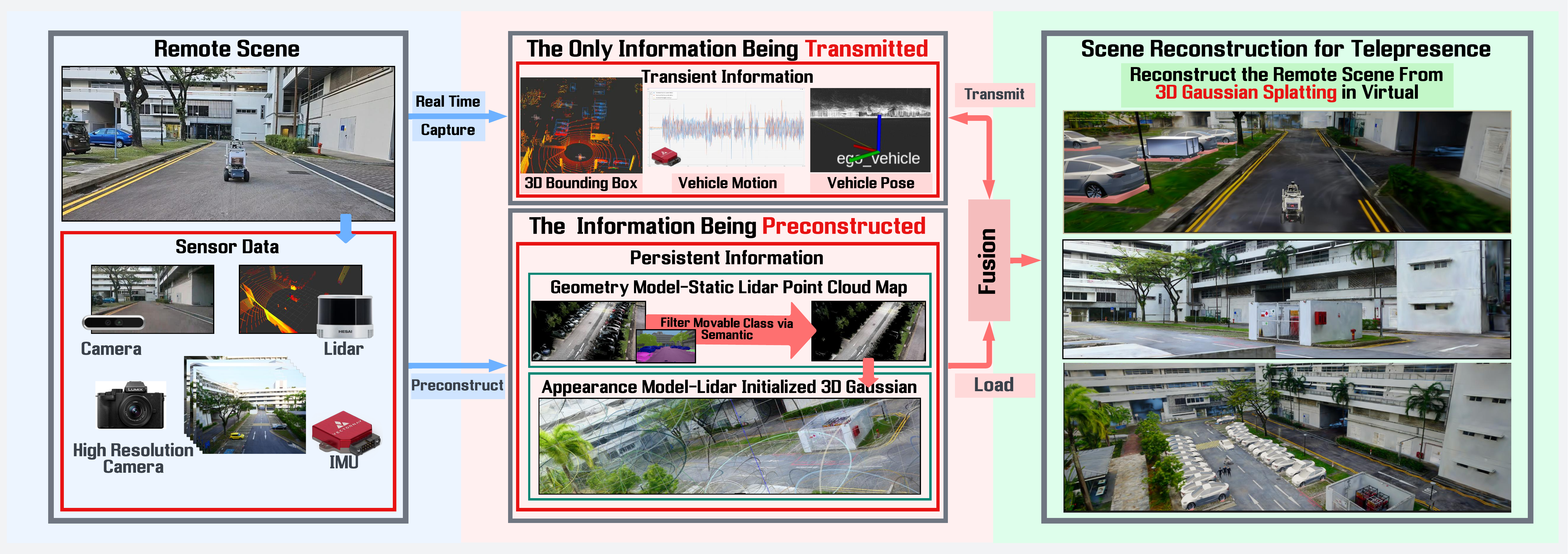
Scene Reconstruction Pipeline
Communication Architecture
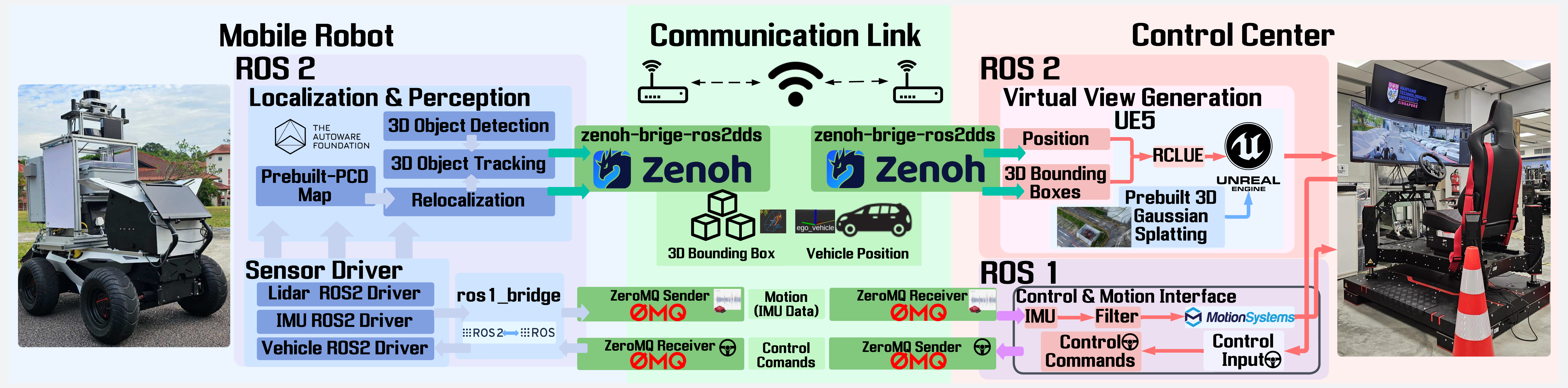
3D Gaussian SplattingUnreal Engine 5ZenohZeroMQLiDAR CenterPointTensorRTNDT+EKF LocalizationROS2